Эффективность работы транспортного потока
Колесов В.И.
Тюменский государственный нефтегазовый университет, г. Тюмень
Постановка задачи. Эффективное управление работой транспортных потоков (ТП) на улично-дорожной сети (УДС) города предполагает выбор разумного критерия, который должен учитывать не только производительность ТП, но и уровень его безопасности и экологичности. Делается попытка с позиций теории подобия привести задачу к критериально планируемому эксперименту, что позволит сократить число варьируемых параметров.
Решение задачи. Эффективную работу транспортного потока (ТП) обусловливают, с точки зрения автора, три ключевых показателя эффективности (КПЭ): производительность ТП, безопасность движения и экологический риск. Постулируется далее, что обобщенная оценка эффективности представляет собой взвешенную сумму частных критериев, зависящих от КПЭ, и в этой связи вначале последовательно рассматриваются КПЭ, а затем синтезируется обобщенная оценка.
Производительность транспортного потока (КПЭ1). В задачах исследования динамических характеристик транспортного потока широко используется модель Танаки [1], основанная на продольном динамическом габарите безопасной езды. Формальная запись динамического габарита, как известно, имеет вид
![]() , (1)
, (1)
что позволяет в итоге выразить как плотность транспортного потока
![]() , (2)
, (2)
так и его интенсивность ![]()
![]() (3)
(3)
(здесь ![]() ,
, ![]() ,
, ![]() - коэффициенты;
- коэффициенты; ![]() - скорость транспортного потока, м/с).
- скорость транспортного потока, м/с).
Технология оценки ![]() ,
,![]() и
и ![]() подробно рассмотрена в работе [2], и, в соответствии с ней значения коэффициентов можно предвычислить и рассчитать затем
подробно рассмотрена в работе [2], и, в соответствии с ней значения коэффициентов можно предвычислить и рассчитать затем ![]() и
и ![]() .
.
Следует, однако, заметить, что в условиях ограничения скорости транспортного потока (в городе ![]() ) поведение кривых
) поведение кривых ![]() и
и ![]() существенно меняется, и вопрос о том, как они деформируются, обсуждался нами в работе [3]. Предлагаемое в ней решение базируется на двух постулатах:
существенно меняется, и вопрос о том, как они деформируются, обсуждался нами в работе [3]. Предлагаемое в ней решение базируется на двух постулатах:
- скорость транспортного потока не может превышать заданный предел (в нашем случае
 км/ч);
км/ч); - продольный габарит безопасной езды
 нарушаться не должен.
нарушаться не должен.
Это по умолчанию означает, что водители переходят на габарит безопасной езды постепенно по мере нарастания плотности транспортного потока. При этом предполагается, что существует точка сопряжения (точка С) режима свободного движения (индекс ![]() ) и режима, соответствующего динамическому габариту (индекс
) и режима, соответствующего динамическому габариту (индекс ![]() ). В работе [3] использован подход к задаче с позиций теории подобия с целью перевода её в разряд критериально планируемого эксперимента, когда приходится переходить к безразмерным величинам
). В работе [3] использован подход к задаче с позиций теории подобия с целью перевода её в разряд критериально планируемого эксперимента, когда приходится переходить к безразмерным величинам ![]() и
и ![]() (здесь
(здесь ![]() ;
; ![]() ;
; ![]() , м;
, м; ![]() ,с;
,с; ![]() , с2/м;
, с2/м;![]()
![]() , км/ч).
, км/ч).
В ходе решения задачи использовано «сшивание» гидродинамической модели и модели следования за лидером. Первая модель характеризует работу ТП на участке свободного движения и имеет структуру [4]
![]() . (4)
. (4)
Аналитическое представление второй модели ![]() , описывающей поведение нормированной скорости ТП (
, описывающей поведение нормированной скорости ТП (![]() ) в условиях строгого соблюдения габарита безопасной езды, предопределено решением квадратного уравнения
) в условиях строгого соблюдения габарита безопасной езды, предопределено решением квадратного уравнения
![]() , т.е.
, т.е.
![]() . (5)
. (5)
Константа ![]() в модели (4) определяется из условия равенства в точке С скоростей
в модели (4) определяется из условия равенства в точке С скоростей ![]() и
и ![]() .
.
Обобщая полученные в работе [3] результаты, следует акцентировать внимание на том, что возможны два подхода к оптимизации производительности транспортного потока:
- максимизации интенсивности транспортного потока;
- максимизации кинетической энергии ТП.
При этом оптимум может находиться на участке либо свободного, либо связанного движения, т.е. приходится учитывать положение точки оптимума (с координатой ![]() ) относительно точки сопряжения С (с координатой
) относительно точки сопряжения С (с координатой ![]() ). Так, для первого подхода, когда
). Так, для первого подхода, когда ![]() экстремум равен
экстремум равен ![]() , иначе -
, иначе -  .
.
Что же касается второго подхода, то относительная кинетическая энергия транспортного потока равна ![]() , и значение экстремума
, и значение экстремума ![]() в случае связанного движения достигается в точке с координатами
в случае связанного движения достигается в точке с координатами ![]() ;
; ![]() а при свободном движении - с координатами
а при свободном движении - с координатами ![]() ;
; ![]() . Экстремальное значение относительной кинетической энергии равно
. Экстремальное значение относительной кинетической энергии равно ![]()
Безопасность движения (КПЭ2). Типовым подходом к решению подобных задач за рубежом является анализ триады «Интенсивность транспортного потока - количество ДТП - количество пострадавших». Этой логике и подчинено изложение материала, при этом первый аспект рассмотрен в предыдущем разделе, а остальные - рассмотрены ниже.
В работах скандинавских исследователей [5] отмечается, в частности, что относительное изменение числа ДТП линейно связано с относительным изменением интенсивности движения, т.е. ![]() (здесь - константа,
(здесь - константа, ![]() ). Это означает,
). Это означает, ![]() . При таком допущении интенсивность ДТП (
. При таком допущении интенсивность ДТП (![]() ) может трактоваться как
) может трактоваться как
![]() , (6)
, (6)
где ![]() - интенсивность ТП как функция его плотности
- интенсивность ТП как функция его плотности ![]() ;
; ![]() - риск происшествия,
- риск происшествия, ![]() . На анализируемом временном интервале (например, год) эту величину полагаем фиксированной, что будет учтено при последующей нормировке интенсивности травматизма. Остается третий аспект триады - количество пострадавших, зависящее от риска (вероятности) ранения при ДТП (P).
. На анализируемом временном интервале (например, год) эту величину полагаем фиксированной, что будет учтено при последующей нормировке интенсивности травматизма. Остается третий аспект триады - количество пострадавших, зависящее от риска (вероятности) ранения при ДТП (P).
Рассматривая интенсивности травматизма при ДТП, следует отметить, что, прежде всего, речь идет о водителе и пассажирах, при этом риск полагается одинаковым для всех. Данные о связи вероятности ранения водителя со скоростью транспортного средства в момент ДТП приведены, в частности, в работе [5]. Проведенная нами их обработка показала, что ![]() соответствует закону Вейбулла, при этом коэффициент детерминации
соответствует закону Вейбулла, при этом коэффициент детерминации ![]() для линеаризованной модели составил 0.9926. . В то же время, как показывает региональная статистика, это не единственные пострадавшие: доля травмированных пешеходов достигает 40%, и это приходится учитывать. Вероятность их травматизма
для линеаризованной модели составил 0.9926. . В то же время, как показывает региональная статистика, это не единственные пострадавшие: доля травмированных пешеходов достигает 40%, и это приходится учитывать. Вероятность их травматизма ![]() обсуждалась в работе [6]. Выполненная нами идентификация линеаризованной модели травматизма пешеходов, показала, что при коэффициенте детерминации R2 =0.93 вероятность
обсуждалась в работе [6]. Выполненная нами идентификация линеаризованной модели травматизма пешеходов, показала, что при коэффициенте детерминации R2 =0.93 вероятность ![]() также соответствует закону Вейбулла (с параметрами
также соответствует закону Вейбулла (с параметрами ![]() ;
; ![]() ) Результирующую вероятность следует рассматривать как взвешенную сумму
) Результирующую вероятность следует рассматривать как взвешенную сумму ![]() и
и ![]()
![]() ,
,
где ![]() - доля пострадавших пешеходов в общем балансе.
- доля пострадавших пешеходов в общем балансе.
Полученный результат приведен на рисунке 1.
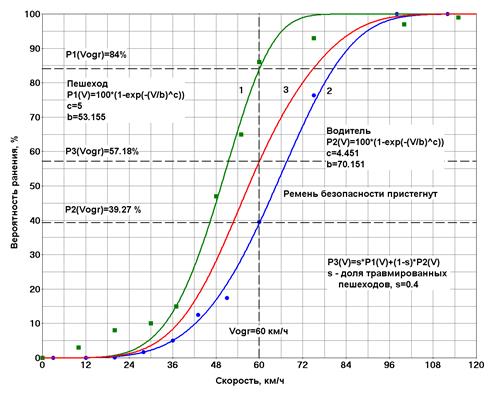
Рисунок 1. Вероятность ранения участников ДТП
Зная связь нормированной скорости транспортного потока ![]() с его нормированной плотностью
с его нормированной плотностью ![]() , можно построить график функции
, можно построить график функции ![]() (рисунок 2).
(рисунок 2).
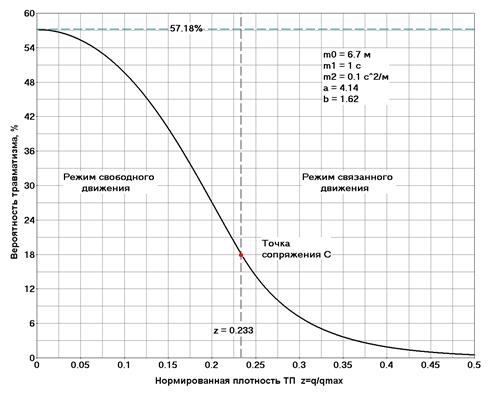
Рисунок 2. График зависимости вероятности травматизма от нормированной плотности транспортного потока ![]()
На рисунке выделена нормированная плотность ТП ![]() , соответствующая переходу свободного движения (СД) в режим соблюдения динамического габарита безопасной езды. Анализ функции
, соответствующая переходу свободного движения (СД) в режим соблюдения динамического габарита безопасной езды. Анализ функции ![]() показывает, что наиболее опасным является режим СД, поскольку именно ему соответствуют повышенные скорости движения.
показывает, что наиболее опасным является режим СД, поскольку именно ему соответствуют повышенные скорости движения.
Наибольший интерес, разумеется, представляют условия, при которых достигается экстремум интенсивности дорожно-транспортных происшествий, связанных с травматизмом (![]() ). К таким ДТП относим происшествия, хотя бы с одним травмированным. Интуитивно ясно, что функция
). К таким ДТП относим происшествия, хотя бы с одним травмированным. Интуитивно ясно, что функция ![]() обусловлена двумя главными причинами: интенсивностью ДТП, во-первых, и вероятностью ранения
обусловлена двумя главными причинами: интенсивностью ДТП, во-первых, и вероятностью ранения ![]() при ДТП, во-вторых. Эту функцию логично записать в виде
при ДТП, во-вторых. Эту функцию логично записать в виде
![]() (7)
(7)
(здесь, как отмечалось, на интервале года риск происшествий ![]() принят фиксированным). График
принят фиксированным). График ![]() представлен на рисунке 3.
представлен на рисунке 3.
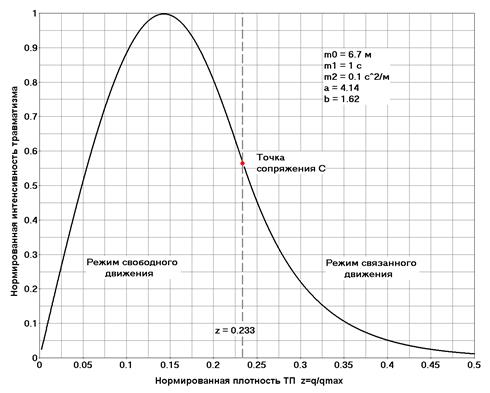
Рисунок 3. Нормированная интенсивность травматизма ![]()
Как видим, максимум травматизма достигается в режиме свободного движения и, как показывает анализ, положение экстремума определяется коэффициентом ![]() продольного динамического габарита.
продольного динамического габарита.
Экологический риск (КПЭ3). Оценке уровня техногенного риска, порожденного транспортными потоками, посвящено значительное число серьезных работ, в частности, монография [7], В ней доказана линейная взаимосвязь между концентрацией вредных веществ в приземном слое ![]() и ёмкостью транспортного потока
и ёмкостью транспортного потока ![]() (под которой понимается произведение интенсивности ТП
(под которой понимается произведение интенсивности ТП ![]() на его плотность
на его плотность ![]() , т.е.
, т.е. ![]() )
)
![]()
![]()
![]() , ( 8)
, ( 8)
где ![]() - коэффициент, зависящий от среднего пробегового выброса транспортного макроисточника
- коэффициент, зависящий от среднего пробегового выброса транспортного макроисточника ![]() и средней скорости ветрового потока
и средней скорости ветрового потока ![]() . Будем полагать, что экологический риск пропорционален
. Будем полагать, что экологический риск пропорционален ![]() .
.
Обобщенная оценка эффективности. При выборе вида обобщенной оценки получили распространение два канонических варианта:
- взвешенная сумма
 (здесь
(здесь - весовые коэффициенты, отвечающие условию нормировки
- весовые коэффициенты, отвечающие условию нормировки ;
; -i-частный критерий,
-i-частный критерий, , если параметр
, если параметр повышает эффективность,
повышает эффективность, , если понижает;
, если понижает; - взвешенное произведение
 .
.
Подходя к ситуации с позиции риска, более предпочтительным представляется первый вариант, при этом можно либо минимизировать негативный эффект, порождаемый рисками, либо максимизировать выигрыш за счет их снижения. Выбран второй путь, при котором целевая функция (ЦФ) принимает вид
![]() (9 )
(9 )
Как отмечалось, эффективность работы транспортного потока обусловлена тремя ключевыми показателями: производительностью ТП, безопасностью движения (численной характеристикой которой является интенсивность травматизма) и экологическим риском, поэтому совершенно очевидно, что в относительно цели (9) производительность ТП является повышающим параметром, а остальные - понижающими. Рассмотрим далее частные критерии.
В условиях перегрузки УДС (когда основной проблемой становятся пробки) в качестве первого частного критерия целесообразно выбрать максимизацию интенсивности ТП (![]() ), тогда (с учетом, что
), тогда (с учетом, что ![]() )
)
![]() . ( 10)
. ( 10)
Когда же вероятность пробок невелика, разумней максимизировать кинетическую энергию транспортного потока ![]() (т.е. оптимизировать его энергетический к.п.д.). В этом случае (при
(т.е. оптимизировать его энергетический к.п.д.). В этом случае (при ![]() ) по аналогии получим
) по аналогии получим
![]() . (11 )
. (11 )
Второй частный критерий определяется интенсивностью травматизма ![]() , рост которой снижает эффективность, следовательно, он (при
, рост которой снижает эффективность, следовательно, он (при ![]() ) должен иметь вид
) должен иметь вид
![]() . (12 )
. (12 )
Третий частный критерий связан с концентрацией вредных веществ в приземном слое ![]() и по аналогии может быть представлен как
и по аналогии может быть представлен как
![]() . (13 )
. (13 )
Модель эффективности (9) весьма чувствительна к весам ![]() . Как правило, исходные данные для их оценки формируют эксперты, а итоговая обработка выполняется программными средствами, например, пакетом MPRIORITY 1.0 [8], реализующим метод анализа иерархий [9]. Результаты расчета приведены на рисунке 4.
. Как правило, исходные данные для их оценки формируют эксперты, а итоговая обработка выполняется программными средствами, например, пакетом MPRIORITY 1.0 [8], реализующим метод анализа иерархий [9]. Результаты расчета приведены на рисунке 4.

Рисунок 4. Результаты расчета весовых коэффициентов (приоритетов)
На первый взгляд расчет эффективности по (9) очень прост, однако он содержит процедуры, выполнить которые без использования программных средств довольно сложно, поэтому была создана рабочая программа, позволившая тщательно исследовать математическую модель обобщенной оценки. Выяснилось, в частности, что эффективности можно придать и иной смысл, например, рентабельности работы транспортного потока ![]() (здесь
(здесь ![]() -положительный эффект (доход), обусловленный снижением рисков:
-положительный эффект (доход), обусловленный снижением рисков: ![]() - негативный эффект (затраты, риски)). Новый показатель, во-первых, оказался очень чувствителен к динамическим характеристикам ТП, а, во-вторых, он наделен (в определенной степени) синергизмом, системно увязывая два антагонистических параметра
- негативный эффект (затраты, риски)). Новый показатель, во-первых, оказался очень чувствителен к динамическим характеристикам ТП, а, во-вторых, он наделен (в определенной степени) синергизмом, системно увязывая два антагонистических параметра ![]() и
и ![]() .
.
График зависимости ![]() приведен на рисунке 5.
приведен на рисунке 5.
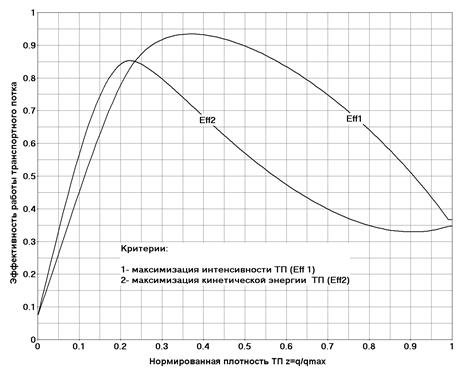
Рисунок 5. Рентабельность транспортного потока ![]()
Таким образом, получены базовые модели эффективности работы транспортного потока в условиях ограничения его скорости в городе и удовлетворяющие требованию безопасной езды. Выполнено их программное тестирование.
Литература:
1. Буслаев А.П., Гасников А.В., Холодов Я.А., Яшина М.В. Введение в математическое моделирование транспортных потоков. - URL:http://crec.mipt.ru/study/courses/optional/gasnikov/Book_Chap3.pdf
2. Соцков Д. А. Моделирование режимов аварийного торможения в транспортном потоке /Д. А. Соцков, Р. В. Нуждин, А. П. Кунаков, А. Г. Назаров //Аналитическое и экспертное обеспечение системы БДД: сб. докл. седьмой междунар. конф. четвертой секц. - СПб.: СПб гос. архит.-строит. ун-т, 2008. - С. 16 - 21.
3. Колесов В.И. Нормированная фундаментальная диаграмма транспортного потока в условиях ограничения скорости //Новые информационные технологии в нефтегазовой отрасли и образовании: материалы V Всероссийской НТК с международным участием. - Тюмень: ТюмГНГУ, 2012. - С. 25-31.
4. Колесов В.И. Нормированная фундаментальная диаграмма транспортного потока в условиях свободного движения // Нефть и газ Западной Сибири: материалы Международной НТК. Т.4. - Тюмень: ТюмГНГУ, 2013. - С. 26 - 30.
5. Рунэ Эльвик, Аннэ Боргер Мюсен, Трулс Ваа. Справочник по безопасности дорожного движения/Пер. с норв. Под редакцией проф. В.В.Сильянова. М.: МАДИ(ГТУ), 2001. 754с.
6. Всемирный доклад о предупреждении дорожно-транспортного травматизма/Пер. с англ. - М.: Издательство «Весь Мир», 2004. - 280 с.
7. Жданов В.Л. Совершенствование метода расчета экологических характеристик городских транспортных макроисточников. - М.: Машиностроение, 2010. - 203 с.
8. Абакаров А.Ш., Сушков Ю.А. Программная система поддержки принятия рациональных решений "MPRIORITY 1.0" // Электронный научный журнал "Исследовано в России", 2005. 2130-2146.
9. Саати Т. Л. Принятие решений. Метод анализа иерархий. - М.: Радио и связь, 1989. - 316 с.